Currently, the YHX controller is only available for the LCMR200 linear conveyor modules in Europe!
Outline: Universal Controller YHX series
YAMAHA's Advanced Robotics Automation Platform realizes cooperative motions and synchronized control among all the robots, peripheral units and devices that make up an automated line.

Universal Controller YHX series
Excellent expandability significantly saves space, reduces costs, and decreases setup man-hours.

*OS: Windows 7 SP1/8/8.1/10 (64-bit version only for all)
*Memory: 8 GB or larger
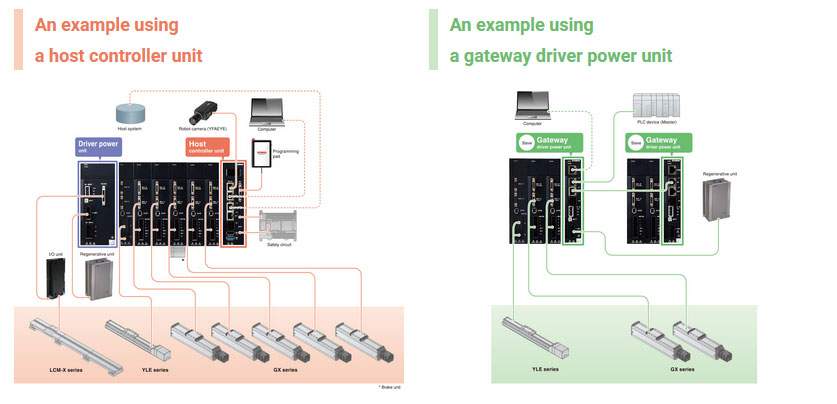
Example System of system configuration
Feature
01 Universal Control System
“FA Universal Controller” that structure an automation production line Structure all robots and peripheral devices that support the Advanced Robotics Automation Platform with a common platform.
This enables to maximize the potential of production line.
Centralized and Integrated Control
The robot integration significantly reduces time-consuming work of automatization.
Integrating a high performance PLC function
One single YHX controller enables universal control.
Completely commonizing archtecture
02 Minimizing Cost
System operation restricted to the labor cost of installation and setup. YHX controller provides more choices and options.
Stacking modular structure
No wiring between modules needed.
Space efficiency in control panel
One stop solution to problems with control panels
The remote IO unit wiring convenience
Reducing actual wiring lengths and simplifying wiring work
03 Commonizing Line Operation
Same commands control all robots and peripheral devices
Enables to build up a improved production line in a short period of time
Unitized PLC control and robot control
04 Expandability
Compatible with various field networks a flexible network
Enables to build up a improved production line in a short period of time
Need to control more axis?
Support a large scale system
Development environment software YHX Studio
The YHX Studio is a software program for programming and adjusting a YHX controller. Download the software program from the website for use. Note that a USB key (dongle) is necessary to run the program.
(If the USB key is not connected with the PC, the YHX Studio is unable to start.)
| Model | YHX-SW-STUDIO |
|---|---|
| Parts No. | KEK-M4990-00 |
| PC operating environment | OS | Windows 7 SP1/8/8.1/10 (64-bit version only for all) |
|---|---|---|
| CPU | Equivalent to Intel Core (TM) i5-6200U 2.30 GHz or better. | |
| Memory | 8 GB or larger | |
| Hard disc drive capacity | 2 GB or more of empty space for destination of installing the YHX Studio. | |
| Communications port | Ethernet | |
| Display | 1920 × 1080 or higher resolution is recommended. | |
| Other | Ethernet cable (Category 5 or better) USB port: One port (for USB key) |
|
| Applicable controllers | YHX | |
| Applicable robots | Robots connectable to YHX | |
Microsoft, Windows and Windows 7 are the registered trademarks or the trademarks of Microsoft Corporation in the United States. Other firms’ names and product names appearing in this catalog are registered trademarks or the trademarks of the respective firms or products concerned.
Outline of programming
The YHX controller chooses the programming languages from the graphic language (LD) and text language (ST) that are defined by the International Electrotechnical Commission’s IEC61131-3. You can choose the optimal language that suits you purpose.


This graphic language is configured by contacts and coils. Since it uses circuit diagram similar to those of relay sequence circuits, it is fit for I/O interlock processing or similar operations.
This is a text language based on the general-purpose programming language “PASCAL”. In the same manner as the sophisticated language “C Language”, you can describe the control by syntax (a control syntax by conditional branch based on a conditional sentence and by loop statement). This is particularly powerful for arithmetic expressions and data processing.
- A control syntax by conditional branch based on a conditional sentence and by loop statement
- Equation using operators (such as * , /, +, -, <, >)
- Calling up functions
- Description of comments using full block characters (2 bytes) such as Kanji and Hiragana
Feature 1: Universal Control System
Universal Control System
“FA Universal Controller” that structure an automation production line Structure all robots and peripheral devices that support the Advanced Robotics Automation Platform with a common platform.
This enables to maximize the potential of production line.
Centralized and Integrated Control
The robot integration significantly reduces time-consuming work of automatization.
In addition to the robot control, various elements for automation such as communication among transport system control, peripheral I/O control, HMI and devices are integrated in one controller.

The YQLink, which connects all YHX host controller, various motor drivers, power units, remote IO units and LCM-X modules, carries out high speed mutual data communication such as control commands and control status data among these units to enable high speed, high precision control over the robots and peripheral devices. This particular high speed network system between modules that YAMAHA has uniquely developed by its own has the high speed performance of 500 Mbps which is about 5 times as high as the conventional field networks. It enables synchronous operation of motors and units up to 255 axes without compromising their performances.
Integrating a high performance PLC function Real time motion PLC
One single YHX controller enables universal control.

With the YHX controller of completely shared unit, the whole production line can be controlled with one software.

Feature 2: Minimizing Cost : Universal Controller YHX series
Minimizing labor and control space
System operation restricted to the labor cost of installation and setup. YHX controller provides more choices and options.
Stacking modular structure
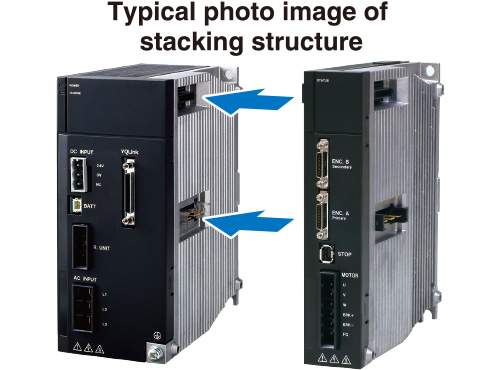
No wiring between modules needed.
Wrapping up a control power supply, motor drive power supply, high speed network communication, safety circuit into a stacking structure overwhelmingly saves the electrical wiring. This eliminates wiring between units, reducing conventional wiring cost and wiring man-hour to 30% to 50%. The stacking structure including host, power and driver is the very first in the industry.

Space efficiency in control panel

The remote IO unit wiring convenience

Reducing actual wiring lengths and simplifying wiring work
The remote IO unit controls the input and output of parallel IO. When having to lay out many wirings for pneumatic valves, sensors and switches, install a remote IO unit with the single dedicated YQLink cable near these devices. You can reduce actual wiring lengths.

Feature 3: Commonizing Line Operation : Universal Controller YHX series
Commonizing line operation
The YHX does not require a different controller, programming pendant box or software program for each robot. Communication settings between each controller and program generation become unnecessary, and it is possible to shorten the software production time significantly.
Same commands control all robots and peripheral devices
Enables to build up a improved production line in a short period of time

Feature 4: Expandability : Universal Controller YHX series
Flexible expandability and connectivity can support high performance requests from customers such as support for a large scale system and improvement of facility efficiency.
Expandability and connectivity
Flexible expandability and connectivity can support high performance requests from customers such as support for a large scale system and improvement of facility efficiency.
Need to control more axis?
Support a large scale system
Using the YQLink expansion unit enables further expansion where more than 16 robots are in operation.
Compatible with various field networks a flexible network
Flexible network configuration is possible
In addition to “EtherNet/IP”, “EtherCAT”, and “PROFINET”, supports “CC-Link”, and flexible network configuration is possible.

Specification ・ Dimension: Universal Controller YHX series
YAMAHA's Advanced Robotics Automation Platform realizes cooperative motions and synchronized control among all the robots, peripheral units and devices that make up an automated line.
Specification ・ Dimension
| Power supply | Control power supply | Voltage: 21.6 to 26.4 VDC (24 V ±10%) |
|---|---|---|
| Current: 3.5 A (Including PoE) | ||
| Connector | External I/F | Giga bit Ethernet · Compatible with PoE yet 1 port (23 W) · Not compatible with PoE yet 1 port Field network (Slave) Select one from the following 5 kinds. · EtherCAT · EtherNet/IP · PROFINET · CC-Link* · DeviceNet* * A separate adaptor is necessary. USB · USB 2.0 1 Port (Bus power 0.5 A) · USB 3.0 1 port (Bus power 1.0 A) |
| HMI | Connector for connecting programming pad | |
| SAFETY | Emergency stop contact output Enable switch contact output Emergency stop input External automatic mode input |
|
| MODE | Motor power ready output (MPRDY output) Programming pad AUTO/MANUAL select key switch output |
|
| Indicator | LCD | 128 x 64 dots, Yellow |
| Dimensions | 41.6×150×125 (mm) | |
| Weight | 750g | |
| Protection structure / Protection rating |
IP20 / class 1 | |

4-Axis Configuration Example Specification
| 4-Axis Configuration Example | Universal Controller Configuration (1 high-capacity power unit + 1 host control unit + 4 driver units) |
Gateway Configuration (Gateway unit + 4 driver units) |
|---|---|---|
| Controllable Robots | Single-axis (AC servo/step) Multiple axis (cartesian) Linear conveyor module Model mix compatible |
Single-axis (AC servo/step) Multiple axis (cartesian, [SCARA]) |
| External Dimensions | H150mm x W232.2mm x D125mm | H150mm x W158.8mm x D125mm |
| Weight | Approx. 4.5kg | Approx. 3kg |
| Power Capacity | Single-phase 3.4kVA/three-phase 6kVA | Single-phase 2.2kVA/three-phase 4.4kVA |
| Allowable Motor Capacity | Single-phase 1.6kW/three-phase 3kW | Single-phase 1kW/three-phase 2.5kW |
| Maximum Number of Connected Axes | 64 *1 | |
| Field Network | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] |
| Functions | PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) PLC functions [ladder/ST/etc.] |
PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) |
| Programing Pad | Connectable | Not connectable |
*1 It may be different depending on the system configuration.
*2 Connection adapter required.
| Power supply | Control power supply | Voltage: 21.6 to 26.4 VDC (24 V ±10%) |
|---|---|---|
| Current: 0.7A | ||
| Main power supply | Input: Single phase / 3-phase 180 to 253 VAC / (200 to 230 VAC ±10%), 50/60 Hz | |
| Power supply capacity: Single phase 2.6 kVA 3-phase 4.4 kVA | ||
| Connection motor capacity | Single phase within 1.2 kW, 3-phase within 2.2kW / Driver unit within 16 units (16 axes) | |
| Connector | Regenerative | Regenerative unit connector |
| External I/F | Ethernet (100 Base) Field network (Slave) Select one from the following 4 kinds. · EtherCAT · EtherNet/IP · PROFINET · CC-Link* * A separate adaptor is necessary. |
|
| ABS Battery | ABS Battery connector | |
| Dimensions | 31.6×150×125 (mm) | |
| Weight | 560g | |
| Protection structure / Protection rating |
IP20 / class 1 | |

4-Axis Configuration Example Specification
| 4-Axis Configuration Example | Universal Controller Configuration (1 high-capacity power unit + 1 host control unit + 4 driver units) |
Gateway Configuration (Gateway unit + 4 driver units) |
|---|---|---|
| Controllable Robots | Single-axis (AC servo/step) Multiple axis (cartesian) Linear conveyor module Model mix compatible |
Single-axis (AC servo/step) Multiple axis (cartesian, [SCARA]) |
| External Dimensions | H150mm x W232.2mm x D125mm | H150mm x W158.8mm x D125mm |
| Weight | Approx. 4.5kg | Approx. 3kg |
| Power Capacity | Single-phase 3.4kVA/three-phase 6kVA | Single-phase 2.2kVA/three-phase 4.4kVA |
| Allowable Motor Capacity | Single-phase 1.6kW/three-phase 3kW | Single-phase 1kW/three-phase 2.5kW |
| Maximum Number of Connected Axes | 64 *1 | |
| Field Network | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] |
| Functions | PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) PLC functions [ladder/ST/etc.] |
PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) |
| Programing Pad | Connectable | Not connectable |
*1 It may be different depending on the system configuration.
*2 Connection adapter required.
| Power supply | Control power supply | Voltage: 21.6 to 26.4 VDC (24 V ±10%) |
|---|---|---|
| Current: 0.5A | ||
| Main power supply | Input: Single phase / 3-phase 180 to 253 VAC / (200 to 230 VAC ±10%), 50/60 Hz | |
| Power supply capacity: Single phase 3.5 kVA 3-phase 6 kVA | ||
| Connection motor capacity | Single phase within 1.6 kW, 3-phase within 3.0kW / Driver unit within 16 units (16 axes) | |
| Connector | Regenerative | Regenerative unit connector |
| External I/F | YQLink | |
| ABS Battery | ABS Battery connector | |
| Dimensions | 63.2×150×125 (mm) | |
| Weight | 1050g | |
| Protection structure / Protection rating |
IP20 / class 1 | |
4-Axis Configuration Example Specification
| 4-Axis Configuration Example | Universal Controller Configuration (1 high-capacity power unit + 1 host control unit + 4 driver units) |
Gateway Configuration (Gateway unit + 4 driver units) |
|---|---|---|
| Controllable Robots | Single-axis (AC servo/step) Multiple axis (cartesian) Linear conveyor module Model mix compatible |
Single-axis (AC servo/step) Multiple axis (cartesian, [SCARA]) |
| External Dimensions | H150mm x W232.2mm x D125mm | H150mm x W158.8mm x D125mm |
| Weight | Approx. 4.5kg | Approx. 3kg |
| Power Capacity | Single-phase 3.4kVA/three-phase 6kVA | Single-phase 2.2kVA/three-phase 4.4kVA |
| Allowable Motor Capacity | Single-phase 1.6kW/three-phase 3kW | Single-phase 1kW/three-phase 2.5kW |
| Maximum Number of Connected Axes | 64 *1 | |
| Field Network | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] |
| Functions | PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) PLC functions [ladder/ST/etc.] |
PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) |
| Programing Pad | Connectable | Not connectable |
*1 It may be different depending on the system configuration.
*2 Connection adapter required.
Driver unit (10A/30A)
10A Specifications Model:YHX-A10 Parts No.:KEK-M5800-0A
30A Specifications Model:YHX-A30 Parts No.:KEK-M5800-1A
| Power supply | Control power supply | Voltage: 21.6 to 26.4 VDC (24 V ±10%) |
|---|---|---|
| Current: 0.8A (Including brake unit power supply) | ||
| Connector | ENC.A | Encoder input |
| ENC.B | Not used | |
| STOP | Gate off input, 2 points Gate status output, 1 point |
|
| MOTOR | Motor drive power supply output Brake power supply output |
|
| ABS Battery | ABS Battery connector | |
| Fan unit connector | Fan unit is connectable. | |
| Brake unit connector | Brake unit is connectable. | |
| Dimensions | 31.6×150×125 (mm) | |
| Weight | 10 A: 560 g / 30 A: 570 g (Including attached fan unit) |
|
| Protection structure / Protection rating |
IP20 / class 1 | |


Driver unit (STEP)
Model:YHX-AVS Parts No.:KEK-M5800-AA
| Power supply | Control power supply | Voltage: 21.6 to 26.4 VDC (24 V ±10%) |
|---|---|---|
| Current: 0.8A | ||
| Connector | ENC.A | Not used |
| ENC.B | Not used | |
| STOP | Gate off input, 2 points Gate status output, 1 point |
|
| MOTOR.A | Encode input Motor drive power supply output |
|
| MOTOR.B | Origin sensor input Brake power supply output |
|
| Dimensions | 31.6×150×125 (mm) | |
| Weight | 550g | |
| Protection structure / Protection rating |
IP20 / class 1 | |

4-Axis Configuration Example Specification
| 4-Axis Configuration Example | Universal Controller Configuration (1 high-capacity power unit + 1 host control unit + 4 driver units) |
Gateway Configuration (Gateway unit + 4 driver units) |
|---|---|---|
| Controllable Robots | Single-axis (AC servo/step) Multiple axis (cartesian) Linear conveyor module Model mix compatible |
Single-axis (AC servo/step) Multiple axis (cartesian, [SCARA]) |
| External Dimensions | H150mm x W232.2mm x D125mm | H150mm x W158.8mm x D125mm |
| Weight | Approx. 4.5kg | Approx. 3kg |
| Power Capacity | Single-phase 3.4kVA/three-phase 6kVA | Single-phase 2.2kVA/three-phase 4.4kVA |
| Allowable Motor Capacity | Single-phase 1.6kW/three-phase 3kW | Single-phase 1kW/three-phase 2.5kW |
| Maximum Number of Connected Axes | 64 *1 | |
| Field Network | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] |
| Functions | PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) PLC functions [ladder/ST/etc.] |
PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) |
| Programing Pad | Connectable | Not connectable |
*1 It may be different depending on the system configuration.
*2 Connection adapter required.
| Power supply | Control power supply | Voltage: 21.6 to 26.4 VDC (24 V ±10%) |
|---|---|---|
| Current: 0.3A | ||
| Connector | External I/F | YQLink |
| SAFETY | Emergency stop input | |
| Dimensions | 31.6×150×125 (mm) | |
| Weight | 380g | |
| Protection structure / Protection rating |
IP20 / class 1 | |

4-Axis Configuration Example Specification
| 4-Axis Configuration Example | Universal Controller Configuration (1 high-capacity power unit + 1 host control unit + 4 driver units) |
Gateway Configuration (Gateway unit + 4 driver units) |
|---|---|---|
| Controllable Robots | Single-axis (AC servo/step) Multiple axis (cartesian) Linear conveyor module Model mix compatible |
Single-axis (AC servo/step) Multiple axis (cartesian, [SCARA]) |
| External Dimensions | H150mm x W232.2mm x D125mm | H150mm x W158.8mm x D125mm |
| Weight | Approx. 4.5kg | Approx. 3kg |
| Power Capacity | Single-phase 3.4kVA/three-phase 6kVA | Single-phase 2.2kVA/three-phase 4.4kVA |
| Allowable Motor Capacity | Single-phase 1.6kW/three-phase 3kW | Single-phase 1kW/three-phase 2.5kW |
| Maximum Number of Connected Axes | 64 *1 | |
| Field Network | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] |
| Functions | PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) PLC functions [ladder/ST/etc.] |
PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) |
| Programing Pad | Connectable | Not connectable |
*1It may be different depending on the system configuration.
*2Connection adapter required.
Remote IO unit Model:YHX-IO Parts No.:KEK-M4400-0A
| Power supply | Control power supply | 21.6 to 26.4 VDC (24 V ±10%) * Supplied via YQLink cable or power supply connector |
|
|---|---|---|---|
| Electric power consumption | Remote IO unit | 3W (24V 125mA) : Per 1 unit * Capable of supplying electric power up to 6 .units If connecting 7 units or more, it is necessary to supply control power separately. |
|
| Connector | I/F | IO | Connector type: 713-1436/037-000 (Made by WAGO)×2 (Input/Output) |
| IO power supply | Connector type: 733-362 (Made by WAGO) | ||
| IO | Number of points | Input: 16 points / Output: 16 points | |
| Type | Common to NPN and PNP (Switched over by power supply connection) | ||
| Current | Input: 7 mA / Output: 100 mA | ||
| Protection circuit | Poly-switch | ||
| Dimensions | 28.5×150×102 (mm) | ||
| Weight | 200g | ||
| Other | Equipped with structure for installing on DIN rails | ||

4-Axis Configuration Example Specification
| 4-Axis Configuration Example | Universal Controller Configuration (1 high-capacity power unit + 1 host control unit + 4 driver units) |
Gateway Configuration (Gateway unit + 4 driver units) |
|---|---|---|
| Controllable Robots | Single-axis (AC servo/step) Multiple axis (cartesian) Linear conveyor module Model mix compatible |
Single-axis (AC servo/step) Multiple axis (cartesian, [SCARA]) |
| External Dimensions | H150mm x W232.2mm x D125mm | H150mm x W158.8mm x D125mm |
| Weight | Approx. 4.5kg | Approx. 3kg |
| Power Capacity | Single-phase 3.4kVA/three-phase 6kVA | Single-phase 2.2kVA/three-phase 4.4kVA |
| Allowable Motor Capacity | Single-phase 1.6kW/three-phase 3kW | Single-phase 1kW/three-phase 2.5kW |
| Maximum Number of Connected Axes | 64 *1 | |
| Field Network | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] |
| Functions | PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) PLC functions [ladder/ST/etc.] |
PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) |
| Programing Pad | Connectable | Not connectable |
*1 It may be different depending on the system configuration.
*2 Connection adapter required.
| Power supply | Input | 254 to 357 VDC (Controller DCBUS connected) |
|---|---|---|
| Connector | Regenerative connector (For connecting regenerative unit/ For adding regenerative unit) | |
| Dimensions | 62.5×180×110 (mm) | |
| Weight | 1450g | |
| Weight | IP20 / class 1 | |
4-Axis Configuration Example Specification
| 4-Axis Configuration Example | Universal Controller Configuration (1 high-capacity power unit + 1 host control unit + 4 driver units) |
Gateway Configuration (Gateway unit + 4 driver units) |
|---|---|---|
| Controllable Robots | Single-axis (AC servo/step) Multiple axis (cartesian) Linear conveyor module Model mix compatible |
Single-axis (AC servo/step) Multiple axis (cartesian, [SCARA]) |
| External Dimensions | H150mm x W232.2mm x D125mm | H150mm x W158.8mm x D125mm |
| Weight | Approx. 4.5kg | Approx. 3kg |
| Power Capacity | Single-phase 3.4kVA/three-phase 6kVA | Single-phase 2.2kVA/three-phase 4.4kVA |
| Allowable Motor Capacity | Single-phase 1.6kW/three-phase 3kW | Single-phase 1kW/three-phase 2.5kW |
| Maximum Number of Connected Axes | 64 *1 | |
| Field Network | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] | Slave [PROFINET⋅EtherNet/IPTM⋅EtherCAT⋅ (CC-Link*2)] |
| Functions | PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) PLC functions [ladder/ST/etc.] |
PTP/Press-in/Coupling 3-dimensional interpolation (straight line/arc) |
| Programing Pad | Connectable | Not connectable |
*1 It may be different depending on the system configuration.
*2 Connection adapter required.