
YK-XGC/XC Type Clean SCARA robots
Introduces the clean SCARA robots.
A clean room applicable model of the SCARA robot.
The Z-axis spline is covered by bellows made of less dust emission materials and other sliding parts are completely sealed.
Harnesses are also completely built-in and the inside of the robot is sucked from the rear of the base to prevent dust emission.
Degree of cleanliness : Class 10 (0.1μm) equivalent to FED-STD-209D (CLASS ISO3 ISO14644-1)
*Per 1cf (0.1µm base),when suction blower is used.
Feature
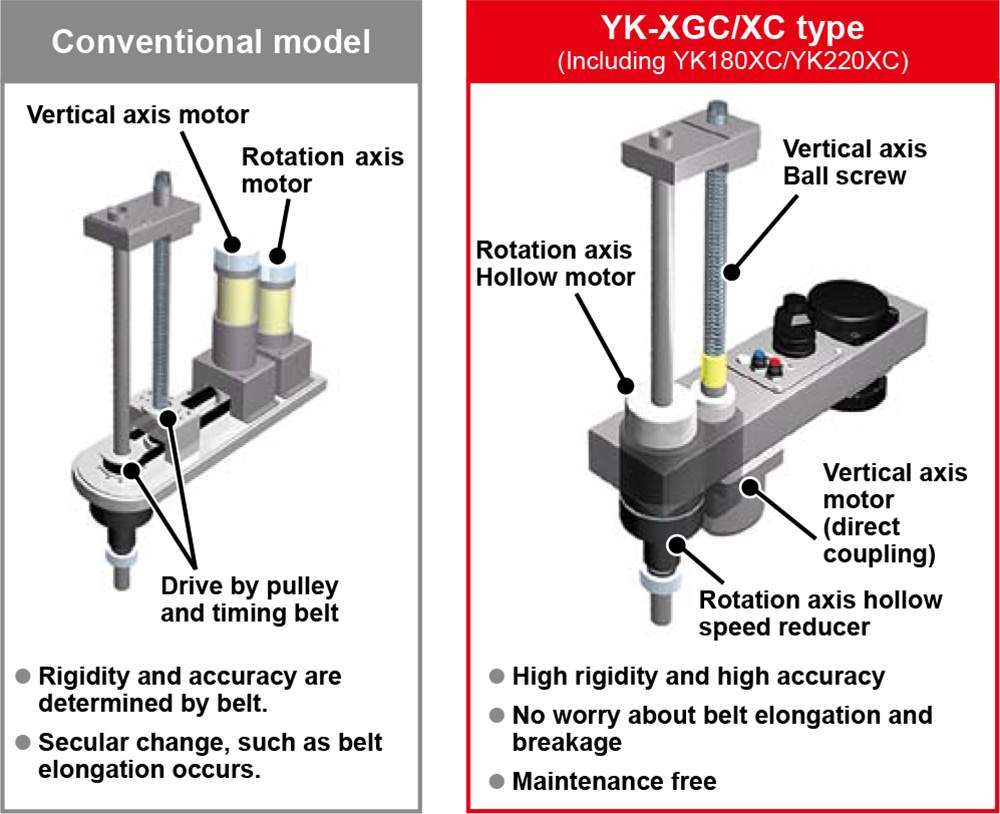
01 Vertical bellows structure improves the reliability of the clean performance.
As a beltless structure is used, no dust generation caused by the belt occurs. Furthermore, as the YK-XGC type was renewed to a structure, in which the bellows are installed on the Z-axis vertically, the reliability of the clean performance was further improved.
Note. Except for YK500XC to YK1000XC

02 High durability
As a beltless structure is used, the robot can be operated without worry about belt elongation and secular change Note.Additionally, the bellows installed on the Z-axis use material with high durability to ensure the durability performance.
Note. Except for YK500XC to YK1000XC
03 Completely beltless structure improves the rigidity.
A completely beltless structure was achieved using a ZR-axis direct coupling structure. As a speed reducer is coupled to the tip rotation axis, the R-axis tolerable moment of inertia is very high and the high-speed movement is possible even with a heavy workpiece or largely offset workpiece.
Note. Except for YK500XC to YK1000XC
Various data
| Model | Type | Arm length (mm) | Maximum payload (kg) | Standard cycle time (sec) |
|---|---|---|---|---|
| Tiny type | 180 | 1 | 0.42 | |
| 220 | 1 | 0.45 | ||
| Small type | 250 | 4 | 0.50 | |
| 350 | 4 | 0.52 | ||
| 400 | 4 | 0.50 | ||
| Medium type | 500 | 4 | 0.66 | |
| 500 | 10 | 0.53 | ||
| 600 | 4 | 0.71 | ||
| 600 | 10 | 0.56 | ||
| 700 | 20 | 0.57 | ||
| 800 | 20 | 0.57 | ||
| 1000 | 20 | 0.60 |